Live Visualization and Processing#
Overview of Callbacks#
As the RunEngine executes a plan, it organizes metadata and data into Documents, Python dictionaries organized in a specified but flexible way. Each time a new Document is created, the RunEngine passes it to a list of functions. These functions can do anything: store the data to disk, print a line of text to the screen, add a point to a plot, or even transfer the data to a cluster for immediate processing. These functions are called “callbacks.”
We “subscribe” callbacks to the live stream of Documents coming from the RunEngine. You can think of a callback as a self-addressed stamped envelope: it tells the RunEngine, “When you create a Document, send it to this function for processing.”
Callback functions are run in a blocking fashion: data acquisition cannot continue until they return. For light tasks like simple plotting or critical tasks like sending the data to a long-term storage medium, this behavior is desirable. It is easy to debug and it guarantees that critical errors will be noticed immediately. But heavy computational tasks — anything that takes more than about 0.2 seconds to finish — should be executed in a separate process or server so that they do not hold up data acquisition. Bluesky provides nice tooling for this use case — see Subscriptions in Separate Processes or Host with 0MQ.
Simplest Working Example#
This example passes every Document to the print function, printing
each Document as it is generated during data collection.
from bluesky.plans import count
from ophyd.sim import det
RE(count([det]), print)
The print function is a blunt instrument; it dumps too much information to
the screen. See LiveTable below for a more refined option.
Ways to Invoke Callbacks#
Interactively#
As in the simple example above, pass a second argument to the RunEngine.
For some callback function cb, the usage is:
RE(plan(), cb))
A working example:
from ophyd.sim import det, motor
from bluesky.plans import scan
from bluesky.callbacks import LiveTable
dets = [det]
RE(scan(dets, motor, 1, 5, 5), LiveTable(["det"]))
A list of callbacks — [cb1, cb2] — is also accepted; see
Filtering by Document Type, below, for additional options.
Persistently#
The RunEngine keeps a list of callbacks to apply to every plan it executes.
For example, the callback that saves the data to a database is typically
invoked this way. For some callback function cb, the usage is:
RE.subscribe(cb)
This step is usually performed in a startup file (i.e., IPython profile).
- RunEngine.subscribe(func, name='all')[source]
Register a callback function to consume documents.
Changed in version 0.10.0: The order of the arguments was swapped and the
nameargument has been given a default value,'all'. Because the meaning of the arguments is unambiguous (they must be a callable and a string, respectively) the old order will be supported indefinitely, with a warning.- Parameters:
- func: callable
expecting signature like
f(name, document)where name is a string and document is a dict- name{‘all’, ‘start’, ‘descriptor’, ‘event’, ‘stop’}, optional
the type of document this function should receive (‘all’ by default)
- Returns:
- tokenint
an integer ID that can be used to unsubscribe
See also
- RunEngine.unsubscribe(token)[source]
Unregister a callback function its integer ID.
- Parameters:
- tokenint
the integer ID issued by
RunEngine.subscribe()
See also
Through a plan#
Use the subs_decorator plan preprocessor to attach
callbacks to a plan so that they are subscribed every time it is run.
In this example, we define a new plan, plan2, that adds some callback
cb to some existing plan, plan1.
from bluesky.preprocessors import subs_decorator
@subs_decorator(cb)
def plan2():
yield from plan1()
or, equivalently,
plan2 = subs_decorator(cb)(plan1)
For example, to define a variant of scan that includes a table by default:
from bluesky.plans import scan
from bluesky.preprocessors import subs_decorator
def my_scan(detectors, motor, start, stop, num, *, per_step=None, md=None):
"This plan takes the same arguments as `scan`."
table = LiveTable([motor.name] + [det.name for det in detectors])
@subs_decorator(table)
def inner():
yield from scan(detectors, motor, start, stop, num,
per_step=per_step, md=md)
yield from inner()
Callbacks for Visualization & Fitting#
LiveTable#
As each data point is collected (i.e., as each Event Document is generated) a row is added to the table. Demo:
In [1]: from bluesky.plans import scan
In [2]: from ophyd.sim import motor, det
In [3]: from bluesky.callbacks import LiveTable
In [4]: RE(scan([det], motor, 1, 5, 5), LiveTable(["motor", "det"]))
+-----------+------------+------------+------------+
| seq_num | time | motor | det |
+-----------+------------+------------+------------+
| 1 | 13:53:00.3 | 1.000 | 0.607 |
| 2 | 13:53:00.3 | 2.000 | 0.135 |
| 3 | 13:53:00.3 | 3.000 | 0.011 |
| 4 | 13:53:00.3 | 4.000 | 0.000 |
| 5 | 13:53:00.3 | 5.000 | 0.000 |
+-----------+------------+------------+------------+
generator scan ['2005cfdd'] (scan num: 1)
Out[4]: ('2005cfdd-4aae-4044-9641-4987d45ee5cf',)
Pass an empty list of columns to show simply ‘time’ and ‘seq_num’ (sequence number).
LiveTable([])
For devices which are implemented using synchronous functions, for example
ophyd devices, it is also possible to pass the device object itself,
as opposed to a field name:
LiveTable([motor])
Internally, LiveTable obtains the name(s) of the field(s) produced by
reading motor. You can do this yourself too:
In [5]: list(motor.describe().keys())
Out[5]: ['motor', 'motor_setpoint']
In the general case, a device can produce tens or even hundreds of separate readings, and it can be useful to spell out specific fields rather than a whole device.
# the field 'motor', in quotes, not the device, motor
LiveTable(['motor'])
In fact, almost all other callbacks (including LivePlot (for scalar data)) require a specific field. They will not accept a device because it may have more than one field.
Warning
For compatibility between ophyd devices, which are implemented using
synchronous functions, and ophyd-async devices, which are implemented using
coroutines, it is recommended to always specify a signal name rather than a
device object in the LiveTable callback.
- class bluesky.callbacks.LiveTable(fields, *, stream_name='primary', print_header_interval=50, min_width=12, default_prec=3, extra_pad=1, separator_lines=True, logbook=None, out=<built-in function print>)[source]#
Live updating table
- Parameters:
- fieldslist
List of fields to add to the table.
- stream_namestr, optional
The event stream to watch for
- print_header_intervalint, optional
Reprint the header every this many lines, defaults to 50
- min_widthint, optional
The minimum width is spaces of the data columns. Defaults to 12
- default_precint, optional
Precision to use if it can not be found in descriptor, defaults to 3
- extra_padint, optional
Number of extra spaces to put around the printed data, defaults to 1
- separator_linesbool, optional
Add empty lines before and after the printed table, default True
- logbookcallable, optional
Must take a sting as the first positional argument
- def logbook(input_str):
pass
- outcallable, optional
Function to call to ‘print’ a line. Defaults to print
Aside: Making plots update live#
Note
If you are a user working with a pre-configured setup, you can probably skip this. Come back if your plots are not appearing / updating.
This configuration is typically performed in an IPython profile startup script so that is happens automatically at startup time.
To make plots live-update while the RunEngine is executing a plan, you have run this command once. In an IPython terminal, the command is:
%matplotlib qt
from bluesky.utils import install_qt_kicker
install_qt_kicker()
If you are using a Jupyter notebook, the command is:
%matplotlib notebook
from bluesky.utils import install_nb_kicker
install_nb_kicker()
Why? The RunEngine and matplotlib (technically, matplotlib’s Qt backend) both use an event loop. The RunEngine takes control of the event loop while it is executing a plan. The kicker function periodically “kicks” the Qt event loop so that the plots can re-draw while the RunEngine is running.
The %matplotlib ... command is standard setup, having nothing to do with
bluesky in particular. See
the relevant section of the IPython documentation
for details.
- bluesky.utils.install_kicker(loop=None, update_rate=0.03)[source]#
Install a periodic callback to integrate drawing and asyncio event loops.
This dispatches to
install_qt_kicker()orinstall_nb_kicker()depending on the current matplotlib backend.- Parameters:
- loopevent loop, optional
- update_ratenumber
Seconds between periodic updates. Default is 0.03.
- bluesky.utils.install_qt_kicker(loop=None, update_rate=0.03)[source]#
Install a periodic callback to integrate Qt and asyncio event loops.
DEPRECATED: This functionality is now handled automatically by default and is configurable via the RunEngine’s new
during_taskparameter. Calling this function now has no effect. It will be removed in a future release of bluesky.- Parameters:
- loopevent loop, optional
- update_ratenumber
Seconds between periodic updates. Default is 0.03.
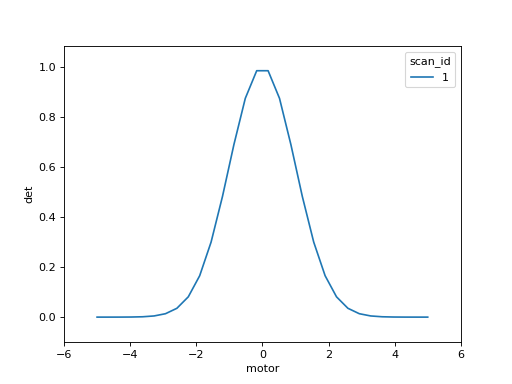
LivePlot (for scalar data)#
Plot scalars. Example:
from bluesky.plans import scan
from ophyd.sim import det, motor
from bluesky.callbacks.mpl_plotting import LivePlot
RE(scan([det], motor, -5, 5, 30), LivePlot('det', 'motor'))
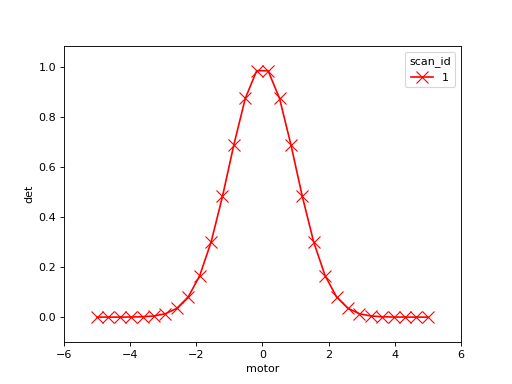
To customize style, pass in any
matplotlib line style keyword argument.
(LivePlot will pass it through to Axes.plot.) Example:
RE(scan([det], motor, -5, 5, 30),
LivePlot('det', 'motor', marker='x', markersize=10, color='red'))
- class bluesky.callbacks.mpl_plotting.LivePlot(y, x=None, *, legend_keys=None, xlim=None, ylim=None, ax=None, fig=None, epoch='run', **kwargs)[source]#
Build a function that updates a plot from a stream of Events.
Note: If your figure blocks the main thread when you are trying to scan with this callback, call plt.ion() in your IPython session.
- Parameters:
- ystr
the name of a data field in an Event
- xstr, optional
the name of a data field in an Event, or ‘seq_num’ or ‘time’ If None, use the Event’s sequence number. Special case: If the Event’s data includes a key named ‘seq_num’ or ‘time’, that takes precedence over the standard ‘seq_num’ and ‘time’ recorded in every Event.
- legend_keyslist, optional
The list of keys to extract from the RunStart document and format in the legend of the plot. The legend will always show the scan_id followed by a colon (“1: “). Each
- xlimtuple, optional
passed to Axes.set_xlim
- ylimtuple, optional
passed to Axes.set_ylim
- axAxes, optional
matplotib Axes; if none specified, new figure and axes are made.
- figFigure, optional
deprecated: use ax instead
- epoch{‘run’, ‘unix’}, optional
If ‘run’ t=0 is the time recorded in the RunStart document. If ‘unix’, t=0 is 1 Jan 1970 (“the UNIX epoch”). Default is ‘run’.
- All additional keyword arguments are passed through to ``Axes.plot``.
Examples
>>> my_plotter = LivePlot('det', 'motor', legend_keys=['sample']) >>> RE(my_scan, my_plotter)
Live Image#
- class bluesky.callbacks.broker.LiveImage(field, *, db=None, cmap=None, norm=None, limit_func=None, auto_redraw=True, interpolation=None, window_title=None)[source]#
Stream 2D images in a cross-section viewer.
- Parameters:
- fieldstring
name of data field in an Event
- fs: Registry instance
The Registry instance to pull the data from
- cmapstr, colormap, or None
color map to use. Defaults to gray
- normNormalize or None
Normalization function to use
- limit_funccallable, optional
function that takes in the image and returns clim values
- auto_redrawbool, optional
- interpolationstr, optional
Interpolation method to use. List of valid options can be found in CrossSection2DView.interpolation
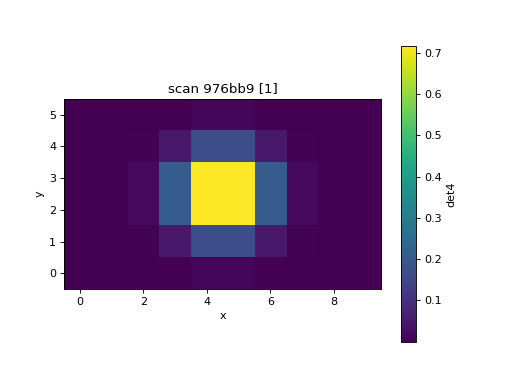
LiveGrid (gridded heat map)#
Plot a scalar value as a function of two variables on a regular grid. Example:
from bluesky.plans import grid_scan
from ophyd.sim import det4, motor1, motor2
from bluesky.callbacks.mpl_plotting import LiveGrid
RE(grid_scan([det4], motor1, -3, 3, 6, motor2, -5, 5, 10, False),
LiveGrid((6, 10), 'det4'))
- class bluesky.callbacks.mpl_plotting.LiveGrid(raster_shape, I, *, clim=None, cmap='viridis', xlabel='x', ylabel='y', extent=None, aspect='equal', ax=None, x_positive='right', y_positive='up', title=None, **kwargs)[source]#
Plot gridded 2D data in a “heat map”.
This assumes that readings are placed on a regular grid and can be placed into an image by sequence number. The seq_num is used to determine which pixel to fill in.
For non-gridded data with arbitrary placement, use
bluesky.callbacks.mpl_plotting.LiveScatter().This simply wraps around a AxesImage.
- Parameters:
- raster_shapetuple
The (row, col) shape of the raster
- Istr
The field to use for the color of the markers
- climtuple, optional
The color limits
- cmapstr or colormap, optional
The color map to use
- xlabel, ylabelstr, optional
Labels for the x and y axis
- extentscalars (left, right, bottom, top), optional
Passed through to
matplotlib.axes.Axes.imshow()- aspectstr or float, optional
Passed through to
matplotlib.axes.Axes.imshow()- axAxes, optional
matplotib Axes; if none specified, new figure and axes are made.
- x_positive: string, optional
Defines the positive direction of the x axis, takes the values ‘right’ (default) or ‘left’.
- y_positive: string, optional
Defines the positive direction of the y axis, takes the values ‘up’ (default) or ‘down’.
- titlestring, optional
Override title of plot. If None (default), title is generated from the scan ID. Set to empty string to remove title.
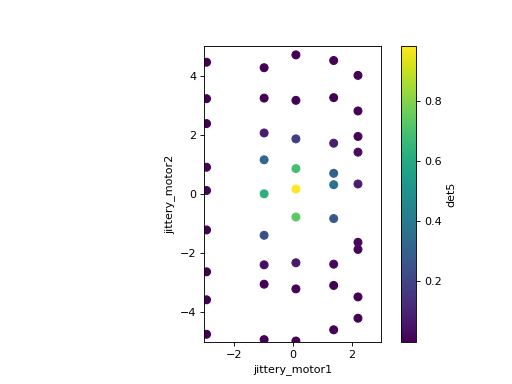
LiveScatter (scattered heat map)#
Plot a scalar value as a function of two variables. Unlike
bluesky.callbacks.mpl_plotting.LiveGrid, this does not assume a regular grid.
Example:
from bluesky.plans import grid_scan
from ophyd.sim import det5, jittery_motor1, jittery_motor2
from bluesky.callbacks.mpl_plotting import LiveScatter
# The 'jittery' example motors won't go exactly where they are told to go.
RE(grid_scan([det5],
jittery_motor1, -3, 3, 6,
jittery_motor2, -5, 5, 10, False),
LiveScatter('jittery_motor1', 'jittery_motor2', 'det5',
xlim=(-3, 3), ylim=(-5, 5)))
- class bluesky.callbacks.mpl_plotting.LiveScatter(x, y, I, *, xlim=None, ylim=None, clim=None, cmap='viridis', ax=None, **kwargs)[source]#
Plot scattered 2D data in a “heat map”.
Alternatively, if the data is placed on a regular grid, you can use
bluesky.callbacks.mpl_plotting.LiveGrid().This simply wraps around a PathCollection as generated by scatter.
- Parameters:
- x, ystr
The fields to use for the x and y data
- Istr
The field to use for the color of the markers
- xlim, ylim, climtuple, optional
The x, y and color limits respectively
- cmapstr or colormap, optional
The color map to use
- axAxes, optional
matplotib Axes; if none specified, new figure and axes are made.
- All additional keyword arguments are passed through to ``Axes.scatter``.
LiveFit#
Perform a nonlinear least squared best fit to the data with a user-defined model function. The function can depend on any number of independent variables. We integrate with the package lmfit, which provides a nice interface for NLS minimization.
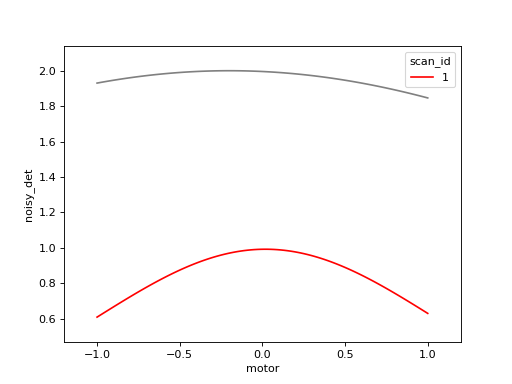
In this example, we fit a Gaussian to detector readings as a function of motor
position. First, define a Gaussian function, create an lmfit.Model from it,
and provide initial guesses for the parameters.
import numpy as np
import lmfit
def gaussian(x, A, sigma, x0):
return A*np.exp(-(x - x0)**2/(2 * sigma**2))
model = lmfit.Model(gaussian)
init_guess = {'A': 2,
'sigma': lmfit.Parameter('sigma', 3, min=0),
'x0': -0.2}
The guesses can be given as plain numbers or as lmfit.Parameter objects, as
in the case of ‘sigma’ above, to specify constraints.
To integrate with the bluesky we need to provide:
the field with the dependent variable (in this example,
'noisy_det')a mapping between the name(s) of independent variable(s) in the function (
'x') to the corresponding field(s) in the data ('motor')any initial guesses expected by the model (defined above)
from bluesky.plans import scan
from ophyd.sim import motor, noisy_det
from bluesky.callbacks import LiveFit
lf = LiveFit(model, 'noisy_det', {'x': 'motor'}, init_guess)
RE(scan([noisy_det], motor, -1, 1, 100), lf)
# best-fit values for 'A', 'sigma' and 'x0' are in lf.result.values
The fit results are accessible in the result attribute of the callback.
For example, the center of the Gaussian is lf.result.values['x0']. This
could be used in a next step, like so:
x0 = lf.result.values['x0']
RE(scan([noisy_det], x0 - 1, x0 + 1, 100))
Refer the
lmfit documentation
for more about result.
This example uses a model with two independent variables, x and y.
from ophyd.sim import motor1, motor2, det4
def gaussian(x, y, A, sigma, x0, y0):
return A*np.exp(-((x - x0)**2 + (y - y0)**2)/(2 * sigma**2))
# Specify the names of the independent variables to Model.
model = lmfit.Model(gaussian, ['x', 'y'])
init_guess = {'A': 2,
'sigma': lmfit.Parameter('sigma', 3, min=0),
'x0': -0.2,
'y0': 0.3}
lf = LiveFit(model, 'det4', {'x': 'motor1', 'y': 'motor2'}, init_guess)
# Scan a 2D mesh.
RE(grid_scan([det4], motor1, -1, 1, 20, motor2, -1, 1, 20, False),
lf)
By default, the fit is recomputed every time a new data point is available. See the API documentation below for other options. Fitting does not commence until the number of accumulated data points is equal to the number of free parameters in the model.
- class bluesky.callbacks.LiveFit(model, y, independent_vars, init_guess=None, *, update_every=1)[source]#
Fit a model to data using nonlinear least-squares minimization.
- Parameters:
- modellmfit.Model
- ystring
name of the field in the Event document that is the dependent variable
- independent_varsdict
map the independent variable name(s) in the model to the field(s) in the Event document; e.g.,
{'x': 'motor'}- init_guessdict, optional
initial guesses for other values, if expected by model; e.g.,
{'sigma': 1}- update_everyint or None, optional
How often to recompute the fit. If None, do not compute until the end. Default is 1 (recompute after each new point).
- Attributes:
- resultlmfit.ModelResult
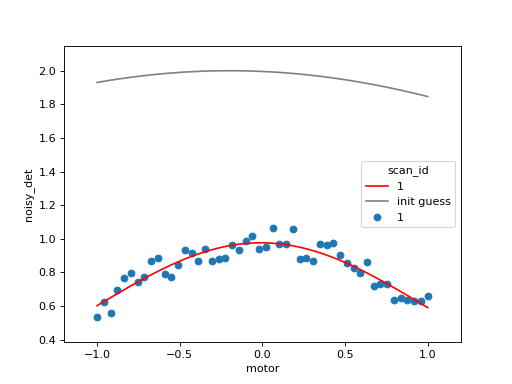
LiveFitPlot#
This is a variation on LivePlot that plots the best fit curve from
LiveFit. It applies to 1D model functions only.
Repeating the example from LiveFit above, adding a plot:
# same as above...
import numpy as np
import lmfit
from bluesky.plans import scan
from ophyd.sim import motor, noisy_det
from bluesky.callbacks import LiveFit
def gaussian(x, A, sigma, x0):
return A*np.exp(-(x - x0)**2/(2 * sigma**2))
model = lmfit.Model(gaussian)
init_guess = {'A': 2,
'sigma': lmfit.Parameter('sigma', 3, min=0),
'x0': -0.2}
lf = LiveFit(model, 'noisy_det', {'x': 'motor'}, init_guess)
# now add the plot...
from bluesky.callbacks.mpl_plotting import LiveFitPlot
lpf = LiveFitPlot(lf, color='r')
RE(scan([noisy_det], motor, -1, 1, 100), lfp)
# Notice that we did'nt need to subscribe lf directly, just lfp.
# But, as before, the results are in lf.result.
We can use the standard LivePlot to show the data on the same axes.
Notice that they can styled independently.
import matplotlib.pyplot as plt
fig, ax = plt.subplots() # explitly create figure, axes to use below
lfp = LiveFitPlot(lf, ax=ax, color='r')
lp = LivePlot('noisy_det', 'motor', ax=ax, marker='o', linestyle='none')
RE(scan([noisy_det], motor, -1, 1, 100), [lp, lfp])
- class bluesky.callbacks.mpl_plotting.LiveFitPlot(livefit, *, num_points=100, legend_keys=None, xlim=None, ylim=None, ax=None, **kwargs)[source]#
Add a plot to an instance of LiveFit.
Note: If your figure blocks the main thread when you are trying to scan with this callback, call plt.ion() in your IPython session.
- Parameters:
- livefitLiveFit
an instance of
LiveFit- num_pointsint, optional
number of points to sample when evaluating the model; default 100
- legend_keyslist, optional
The list of keys to extract from the RunStart document and format in the legend of the plot. The legend will always show the scan_id followed by a colon (“1: “). Each
- xlimtuple, optional
passed to Axes.set_xlim
- ylimtuple, optional
passed to Axes.set_ylim
- axAxes, optional
matplotib Axes; if none specified, new figure and axes are made.
- All additional keyword arguments are passed through to ``Axes.plot``.
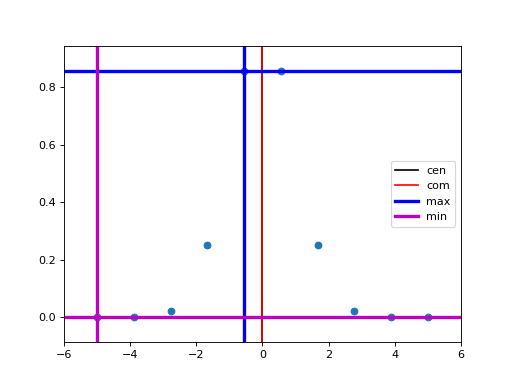
PeakStats#
Compute statistics of peak-like data. Example:
from bluesky.callbacks.fitting import PeakStats
from ophyd.sim import motor, det
from bluesky.plans import scan
ps = PeakStats('motor', 'det')
RE(scan([det], motor, -5, 5, 10), ps)
Now attributes of ps, documented below, contain various peak statistics.
There is also a convenience function for plotting:
from bluesky.callbacks.mpl_plotting import plot_peak_stats
plot_peak_stats(ps)
- class bluesky.callbacks.fitting.PeakStats(x, y, *, edge_count=None, calc_derivative_and_stats=False)[source]#
Compute peak statsitics after a run finishes.
Results are stored in the attributes.
- Parameters:
- xstring
field name for the x variable (e.g., a motor)
- ystring
field name for the y variable (e.g., a detector)
- calc_derivative_and_statsbool, optional
calculate derivative of the readings and its stats. False by default.
- edge_countint or None, optional
If not None, number of points at beginning and end to use for quick and dirty background subtraction.
- Attributes:
- comcenter of mass
- cenmid-point between half-max points on each side of the peak
- maxx location of y maximum
- minx location of y minimum
- crossingscrosses between y and middle line, which is
((np.max(y) + np.min(y)) / 2). Users can estimate FWHM based on those info.
- fwhmthe computed full width half maximum (fwhm) of a peak.
The distance between the first and last crossing is taken to be the fwhm.
Notes
It is assumed that the two fields, x and y, are recorded in the same Event stream.
Best-Effort Callback#
Warning
This is a new, experimental feature. It will likely be changed in future releases in a way that is not backward-compatible.
This is meant to be permanently subscribed to the RunEngine like so:
# one-time configuration
from bluesky.callbacks.best_effort import BestEffortCallback
bec = BestEffortCallback()
RE.subscribe(bec)
It provides best-effort plots and visualization for any plan. It uses the
‘hints’ key provided by the plan, if present. (See the source code of the
plans in bluesky.plans for examples.)
In [6]: from ophyd.sim import det1, det2
In [7]: from bluesky.plans import scan
In [8]: dets = [det1, det2]
In [9]: RE(scan(dets, motor, 1, 5, 5)) # automatically prints table, shows plot
Transient Scan ID: 2 Time: 2026-07-13 13:53:24
Persistent Unique Scan ID: 'b267cb0b-7eff-4b2e-8a43-5a5eb296a675'
New stream: 'primary'
+-----------+------------+------------+------------+------------+
| seq_num | time | motor | det1 | det2 |
+-----------+------------+------------+------------+------------+
| 1 | 13:53:24.0 | 1.000 | 0.000 | 0.271 |
| 2 | 13:53:24.2 | 2.000 | 0.000 | 0.271 |
| 3 | 13:53:24.4 | 3.000 | 0.000 | 0.271 |
| 4 | 13:53:24.6 | 4.000 | 0.000 | 0.271 |
| 5 | 13:53:24.7 | 5.000 | 0.000 | 0.271 |
+-----------+------------+------------+------------+------------+
generator scan ['b267cb0b'] (scan num: 2)
Out[9]: ('b267cb0b-7eff-4b2e-8a43-5a5eb296a675',)
Use these methods to toggle on or off parts of the functionality.
|
|
Print timestamp and IDs at the top of a run. |
|
Opposite of enable_heading() |
|
Print hinted readings from the 'primary' stream in a LiveTable. |
|
Opposite of enable_table() |
|
Print hinted fields from the 'baseline' stream. |
|
Opposite of enable_baseline() |
|
Plot hinted fields from all streams not in |
|
Do not plot anything. |
Blacklist plotting certain streams using the bec.noplot_streams attribute,
which is a list of stream names. The blacklist is set to ['baseline'] by
default.
The attribute bec.overplot can be used to control whether line plots for
subsequent runs are plotted on the same axes. It is True by default.
Overplotting only occurs if the names of the axes are the same from one plot
to the next.
Peak Stats#
For each plot, simple peak-fitting is performed in the background. Of course, it may or may not be applicable depending on your data, and it is not shown by default. To view fitting annotations in a plot, click the plot area and press Shift+P. (Lowercase p is a shortcut for “panning” the plot.)
To access the peak-fit statistics programmatically, use bec.peaks.
Hints#
The best-effort callback aims to print and plot useful information without
being overwhelmingly comprehensive. Its usefulness is improved and tuned by the
hints attribute on devices (if available) and hints metadata injected
by plans (if available). If either or both of these are not available, the
best-effort callback still makes a best effort to display something useful.
The contents of hints do not at all affect what data is saved. The content only affect what is displayed automatically by the best-effort callback and other tools that opt to look at the hints. Additional callbacks may still be set up for live or post-facto visualization or processing that do more specific things without relying on hints.
The hints attribute or property on devices is a dictionary with the key
'fields' mapped to a list of fields.
On movable devices such as motors or temperature controllers, these fields are
expected to comprise the independent axes of the device. A motor that reads
the fields ['x', 'x_setpoint'] might provide the hint {'fields': ['x']}
to indicate that it has one independent axis and that the field x is the best
representation of its value.
A readable device might report many fields like
['chan1', 'chan2', 'chan3', 'chan4', 'chan5'] but perhaps only a couple are
usually interesting. A useful hint might narrow them down to
{'fields': ['chan1', 'chan2']} so that a “best-effort” plot does not
display an overwhelming amount of information.
The hints provided by the devices are read by the RunEngine and collated in the Event Descriptor documents.
The plans generally know which devices are being used as dependent and
independent variables (i.e., which are being “scanned” over), and they may
provide this information via a 'hints' metadata key that they inject into
the start document along with the rest of their metadata. Examples:
# The pattern is
# {'dimensions': [(fields, stream_name), (fields, stream_name), ...]}
# a scan over time
{'dimensions': [(('time',), 'primary')]}
# a one-dimensional scan
{'dimensions': [(motor.hints['fields'], 'primary')]}
# a two-dimensional scan
{'dimensions': [(x_motor.hints['fields'], 'primary'),
(y_motor.hints['fields'], 'primary')]}
# an N-dimensional scan
{'dimensions': [(motor.hints['fields'], 'primary') for motor in motors]}
It’s possible to adjust hints interactively, but they are generally intended to be set in a startup file. Err on the side of displaying more information than you need to see, and you will rarely need to adjust them.
Plans may also hint that their data is sampled on a regular rectangular grid
via the hint {'gridding': 'rectilinear'}. This is useful, for example, for
decided whether to visualize 2D data with LiveGrid or with LiveScatter.
Callback for Export#
Exporting Image Data as TIFF Files#
First, compose a filename template. The template can include metadata or event data from the scan.
# a template that includes the scan ID and sequence number in each filename
template = "output_dir/{start[scan_id]}_{event[seq_num]}.tiff"
# a template that sorts files into directories based user and scan ID
template = "output_dir/{start[user]}/{start[scan_id]}/{event[seq_num]}.tiff"
# a more complex template includes actual measurements in the filenames
template = ("output_dir/{start[scan_id]}_{start[sample_name]}_"
"{event[data][temperature]}_{event[seq_num]}.tiff")
Above, we are using a Python language feature called format strings. Notice
that inside the curly brackets we don’t use quotes around the key names; it’s
{event[seq_num]} not {event['seq_num']}.
If each image data point is actually a stack of 2D image planes, the template
must also include {i}, which will count through the image planes in the
stack.
Note
Most metadata comes from the “start” document, hence start.scan_id
above. Review the Documents section for details.
Create a callback that exports TIFFs using your template.
from bluesky.callbacks.broker import LiveTiffExporter
exporter = LiveTiffExporter('image', template)
Finally, to export all the images from a run when it finishes running, wrap the
exporter in post_run and subscribe.
from bluesky.callbacks.broker import post_run
RE.subscribe(post_run(exporter))
It also possible to write TIFFs live, hence the name LiveTiffExporter, but
there is an important disadvantage to doing this subscription in the same
process: progress of the experiment may be intermittently slowed while data is
written to disk. In some circumstances, this affect on the timing of the
experiment may not be acceptable.
RE.subscribe(exporter)
There are more configuration options available, as given in detail below. It is recommended to use these expensive callbacks in a separate process.
- class bluesky.callbacks.broker.LiveTiffExporter(field, template, dryrun=False, overwrite=False, db=None)[source]#
Save TIFF files.
Incorporate metadata and data from individual data points in the filenames.
- Parameters:
- fieldstr
a data key, e.g., ‘image’
- templatestr
A templated file path, where curly brackets will be filled in with the attributes of ‘start’, ‘event’, and (for image stacks) ‘i’, a sequential number. e.g., “dir/scan{start[scan_id]}_by_{start[experimenter]}_{i}.tiff”
- dryrunbool
default to False; if True, do not write any files
- overwritebool
default to False, raising an OSError if file exists
- dbBroker, optional
The databroker instance to use, if not provided use databroker singleton
- Attributes:
- filenameslist of filenames written in ongoing or most recent run
Export All Data and Metadata in an HDF5 File#
A Stop Document is emitted at the end of every run. Subscribe to it, using it as a cue to load the dataset via the DataBroker and export an HDF5 file using suitcase.
Working example:
from databroker import DataBroker as db
import suitcase
def suitcase_as_callback(name, doc):
if name != 'stop':
return
run_start_uid = doc['run_start']
header = db[run_start_uid]
filename = '{}.h5'.format(run_start_uid)
suitcase.export(header, filename)
RE.subscribe(suitcase_as_callback, 'stop')
Export Metadata to the Olog#
The Olog (“operational log”) is an electronic logbook. We can use a callback to automatically generate log entries at the beginning of a run. The Python interface to Olog is not straightforward, so there is some boilerplate:
from functools import partial
from pyOlog import SimpleOlogClient
from bluesky.callbacks.olog import logbook_cb_factory
# Set up the logbook. This configures bluesky's summaries of
# data acquisition (scan type, ID, etc.).
LOGBOOKS = ['Data Acquisition'] # list of logbook names to publish to
simple_olog_client = SimpleOlogClient()
generic_logbook_func = simple_olog_client.log
configured_logbook_func = partial(generic_logbook_func, logbooks=LOGBOOKS)
cb = logbook_cb_factory(configured_logbook_func)
RE.subscribe(cb, 'start')
The module bluesky.callbacks.olog includes some templates that format the
data from the ‘start’ document into a readable log entry. You can also write
customize templates and pass them to logbook_cb_factory.
You may specify a custom template. Here is a very simple example; see the source code for a more complex example (the default template).
CUSTOM_TEMPLATE = """
My Log Entry
{{ start.plan_name }}
Detectors: {{ start.detectors }}
"""
# Do same boilerplate above to set up configured_logbook_func. Then:
cb = logbook_cb_factory(configured_logbook_func,
desc_template=CUSTOM_TEMPLATE)
You may also specify a variety of different templates that are suitable for
different kinds of plans. The callback will use the 'plan_name' field to
determine which template to use.
# a template for a 'count' plan (which has no motors)
COUNT_TEMPLATE = """
Plan Name: {{ start.plan_name }}
Detectors: {{ start.detectors }}
"""
# a template for any plan with motors
SCAN_TEMPLATE = """
Plan Name: {{ start.plan_name }}
Detectors: {{ start.detectors }}
Motor(s): {{ start.motors }}
"""
templates = {'count': COUNT_TEMPLATE,
'scan': SCAN_TEMPLATE,
'rel_scan': SCAN_TEMPLATE}
# Do same boilerplate above to set up configured_logbook_func. Then:
cb = logbook_cb_factory(configured_logbook_func,
desc_dispatch=templates)
- bluesky.callbacks.olog.logbook_cb_factory(logbook_func, desc_template=None, long_template=None, desc_dispatch=None, long_dispatch=None)[source]#
Create a logbook run_start callback
The returned function is suitable for registering as a ‘start’ callback on the the BlueSky run engine.
- Parameters:
- logbook_funccallable
The required signature should match the API
SimpleOlogClient.log. It is:logbook_func(text=None, logbooks=None, tags=None, properties=None, attachments=None, verify=True, ensure=False)
- desc_templatestr, optional
A jinja2 template to be used for the description line in olog. This is the default used if the plan_name does not map to a more specific one.
- long_templatestr, optional
A jinja2 template to be used for the attachment in olog. This is the default used if the plan_name does not map to a more specific one.
- desc_dispatch, long_dispatchmapping, optional
Mappings between ‘plan_name’ to jinja2 templates to use for the description and attachments respectively.
Verify Data Has Been Saved#
The following verifies that all Documents and external files from a run have been saved to disk and are accessible from the DataBroker. It prints a message indicating success or failure.
Note: If the data collection machine is not able to access the machine where some external data is being saved, it will indicate failure. This can be a false alarm.
from bluesky.callbacks.broker import post_run, verify_files_saved
RE.subscribe(post_run(verify_files_saved))
Ignoring Callback Exceptions#
If an exception is raised while processing a callback, the error can interrupt data collection. Sometimes, this is good: if, for example, the callback that is saving your data encounters an error, you want to know immediately rather than continuing to think you are collecting data when in fact it is being lost. But in many situations, such as visualization or first-pass data processing, it is usually better for data collection to proceed even if a callback fails. These decorators may be used to wrap callbacks so that any errors they encounter are converted to log messages.
- bluesky.callbacks.core.make_callback_safe(func=None, *, logger=None)[source]#
If the wrapped func raises any exceptions, log them but continue.
This is intended to ensure that any failures in non-critical callbacks do not interrupt data acquisition. It should not be applied to any critical callbacks, such as ones that perform data-saving, but is well suited to callbacks that perform non-critical streaming visualization or data processing.
To debug the issue causing a failure, it can be convenient to turn this off and let the failures raise. To do this, set the environment variable
BLUESKY_DEBUG_CALLBACKS=1.- Parameters:
- func: callable
- logger: logging.Logger, optional
Examples
Decorate a callback to make sure it will not interrupt data acquisition if it fails.
>>> @make_callback_safe ... def callback(name, doc): ... ...
- bluesky.callbacks.core.make_class_safe(cls=None, *, to_wrap=None, logger=None)[source]#
If the wrapped func raises any exceptions, log them but continue.
This is intended to ensure that any failures in non-critical callbacks do not interrupt data acquisition. It should not be applied to any critical callbacks, such as ones that perform data-saving, but is well suited to callbacks that perform non-critical streaming visualization or data processing.
To debug the issue causing a failure, it can be convenient to turn this off and let the failures raise. To do this, set the environment variable
BLUESKY_DEBUG_CALLBACKS=1.- Parameters:
- cls: callable
- to_wrap: List[String], optional
Names of methods of cls to wrap. Default is
['__call__'].- logger: logging.Logger, optional
Examples
Decorate a class to make sure it will not interrupt data acquisition if it fails.
>>> @make_class_safe ... class Callback(event_model.DocumentRouter): ... ...
It is also possible to configure the RunEngine to ignore all callback exceptions globally, but this feature is not recommended.
RE.ignore_callback_exceptions = False
Changed in version 0.6.4: In bluesky version 0.6.4 (September 2016) the default value was changed from
True to False.
Filtering by Document Type#
There are four “subscriptions” that a callback to receive documents from:
‘start’
‘stop’
‘event’
‘descriptor’
Additionally, there is an ‘all’ subscription.
The command:
RE(plan(), cb)
is a shorthand that is normalized to {'all': [cb]}. To receive only certain
documents, specify the document routing explicitly. Examples:
RE(plan(), {'start': [cb]}
RE(plan(), {'all': [cb1, cb2], 'start': [cb3]})
The subs_decorator, presented above, accepts the same variety of inputs.
Writing Custom Callbacks#
Any function that accepts a Python dictionary as its argument can be used as a callback. Refer to simple examples above to get started.
Two Simple Custom Callbacks#
These simple examples illustrate the concept and the usage.
First, we define a function that takes two arguments
the name of the Document type (‘start’, ‘stop’, ‘event’, or ‘descriptor’)
the Document itself, a dictionary
This is the callback.
In [10]: def print_data(name, doc):
....: print("Measured: %s" % doc['data'])
....:
Then, we tell the RunEngine to call this function on each Event Document. We are setting up a subscription.
In [11]: from ophyd.sim import det
In [12]: from bluesky.plans import count
In [13]: RE(count([det]), {'event': print_data})
Transient Scan ID: 3 Time: 2026-07-13 13:53:26
Persistent Unique Scan ID: '5a6220e9-efbc-401d-9a53-c2f28c138da4'
New stream: 'primary'
+-----------+------------+------------+
| seq_num | time | det |
+-----------+------------+------------+
| 1 | 13:53:26.0 | 0.000 |
Measured: {'det': np.float64(3.726653172078671e-06)}
+-----------+------------+------------+
generator count ['5a6220e9'] (scan num: 3)
Out[13]: ('5a6220e9-efbc-401d-9a53-c2f28c138da4',)
Each time the RunEngine generates a new Event Document (i.e., data point)
print_data is called.
There are five kinds of subscriptions matching the four kinds of Documents plus an ‘all’ subscription that receives all Documents.
‘start’
‘descriptor’
‘event’
‘stop’
‘all’
We can use the ‘stop’ subscription to trigger automatic end-of-run activities. For example:
def celebrate(name, doc):
# Do nothing with the input; just use it as a signal that run is over.
print("The run is finished!")
Let’s use both print_data and celebrate at once.
RE(plan(), {'event': print_data, 'stop': celebrate})
Using multiple document types#
Some tasks use only one Document type, but we often need to use more than one. For example, LiveTable uses ‘start’ kick off the creation of a fresh table, it uses ‘event’ to see the data, and it uses ‘stop’ to draw the bottom border.
A convenient pattern for this kind of subscription is a class with a method for each Document type.
from bluesky.callbacks import CallbackBase
class MyCallback(CallbackBase):
def start(self, doc):
print("I got a new 'start' Document")
# Do something
def descriptor(self, doc):
print("I got a new 'descriptor' Document")
# Do something
def event(self, doc):
print("I got a new 'event' Document")
# Do something
def stop(self, doc):
print("I got a new 'stop' Document")
# Do something
The base class, CallbackBase, takes care of dispatching each Document to
the corresponding method. If your application does not need all four, you may
simple omit methods that aren’t required.
Subscriptions in Separate Processes or Host with 0MQ#
Because subscriptions are processed during a scan, it’s possible that they can slow down data collection. We mitigate this by making the subscriptions run in a separate process.
In the main process, where the RunEngine is executing the plan, a Publisher
is created. It subscribes to the RunEngine. It serializes the documents it
receives and it sends them over a socket to a 0MQ proxy which rebroadcasts the
documents to any number of other processes or machines on the network.
These other processes or machines set up a RemoteDispatcher which connects
to the proxy receives the documents, and then runs callbacks just as they would
be run if they were in the local RunEngine process.
Multiple Publishers (each with its own RunEngine) can send documents to the same proxy. RemoteDispatchers can filter the document stream based a byte prefix.
Minimal Example#
Start a 0MQ proxy using the CLI packaged with bluesky. It requires two ports as arguments.
bluesky-0MQ-proxy --in-address localhost:5577 --out-address localhost:5578
Alternatively, you can start the proxy using a Python API:
from bluesky.callbacks.zmq import Proxy
proxy = Proxy(in_address='localhost:5577', out_address='localhost:5578')
proxy.start()
Start a callback that will receive documents from the proxy and, in this simple example, just print them.
from bluesky.callbacks.zmq import RemoteDispatcher
d = RemoteDispatcher('localhost:5578')
d.subscribe(print)
# when done subscribing things and ready to use:
d.start() # runs event loop forever
Qt5 equivelant example where generated documents printed as string in a QLabel as well as the console.
#!python3
from PyQt5 import QtWidgets
class tst_window(QtWidgets.QWidget):
def __init__(self):
super(tst_window, self).__init__()
self.lbl = QtWidgets.QLabel('TEST')
vbox = QtWidgets.QVBoxLayout()
vbox.addWidget(self.lbl)
self.setLayout(vbox)
def print_callback(self, *args, **dud):
name, doc = args
print(doc)
self.lbl.setText(str(doc))
if __name__ == "__main__":
"""Test"""
# -- Create QApplication
from PyQt5 import QtWidgets
from bluesky.callbacks.zmq import RemoteDispatcher
from bluesky.utils import install_remote_qt_kicker
app = QtWidgets.QApplication([])
win = tst_window()
d = RemoteDispatcher('localhost:5578')
d.subscribe(win.print_callback)
install_remote_qt_kicker(loop=d.loop)
win.show()
# starts the event loop for asnycio as well as it will call processEvents() for Qt
d.start()
As described above, if you want to use any live-updating plots,
you will need to install a “kicker”. It needs to be installed on the same
event loop used by the RemoteDispatcher, like so, and it must be done before
calling d.start().
In the most recent versions of BlueSky the kickers were deprecated because the RunEngine now contains a during_task parameter that defaults to DefaultDuringTask which takes care of calling the Qt event loop so that Qt applications will process properly. The issue is that not all Qt applications are themselves the creators of a RunEngine instance, as in the case of RemoteDispatcher. When using RemoteDispatcher in a Qt application you need to call install_remote_qt_kicker and
from bluesky.utils import install_remote_qt_kicker
install_remote_qt_kicker(loop=d.loop)
In a Jupyter notebook, replace install_remote_qt_kicker with
install_nb_kicker.
On the machine/process where you want to collect data, hook up a subscription to publish documents to the proxy.
# Create a RunEngine instance (or, of course, use your existing one).
from bluesky import RunEngine, Msg
RE = RunEngine({})
from bluesky.callbacks.zmq import Publisher
publisher = Publisher('localhost:5577')
RE.subscribe(publisher)
Finally, execute a plan with the RunEngine. As a result, the callback in the RemoteDispatcher should print the documents generated by this plan.
Publisher / RemoteDispatcher API#
- class bluesky.callbacks.zmq.Proxy(in_address: str | tuple[str, int] | None = None, out_address: str | tuple[str, int] | None = None, *, in_curve: ServerCurve | ClientCurve | None = None, out_curve: ServerCurve | ClientCurve | None = None, in_bind: bool = True, out_bind: bool = True, in_port: int | None = None, out_port: int | None = None)[source]#
Start a 0MQ proxy on the local host.
The addresses can be specified flexibly. It is best to use a domain_socket (available on unix):
'icp:///tmp/domain_socket'('ipc', '/tmp/domain_socket')
tcp sockets are also supported:
'tcp://localhost:6557'6657(implicitly binds to'tcp://localhost:6557'('tcp', 'localhost', 6657)('localhost', 6657)
- Parameters:
- in_addressstr or tuple or int, optional
Address that RunEngines should broadcast to. If None, a random tcp port on all interfaces is used.
- out_addressstr or tuple or int, optional
Address that subscribers should subscribe to. If None, a random tcp port on all interfaces is used.
- in_curve: ServerCurve or ClientCurve or None, optional
CURVE security configuration for the incoming socket. If None, no security is applied.
- out_curve: ServerCurve or ClientCurve or None, optional
CURVE security configuration for the outgoing socket. If None, no security is applied.
- in_bind: bool, default True
If True, the incoming socket will be bound to the address.
- out_bind: bool, default True
If True, the outgoing socket will be bound to the address.
- in_port: int or None, optional
DEPRECATED alias for in_address. If specified, must be used instead of in_address
- out_port: int or None, optional
DEPRECATED alias for out_address. If specified, must be used instead of out_address
- Attributes:
- in_address: int or str or tuple
Port that RunEngines should broadcast to.
- out_addressint or str or tuple
Port that subscribers should subscribe to.
- closedboolean
True if the Proxy has already been started and subsequently interrupted and is therefore unusable.
Examples
Run on specific ports.
>>> proxy = Proxy(in_address='localhost:5567', out_address='localhost:5568') >>> proxy Proxy(in_port=5567, out_port=5568) >>> proxy.start() # runs until interrupted
Run on random ports, and access those ports before starting.
>>> proxy = Proxy() >>> proxy Proxy(in_port=56504, out_port=56505) >>> proxy.in_port 56504 >>> proxy.out_port 56505 >>> proxy.start() # runs until interrupted
- class bluesky.callbacks.zmq.Publisher(address: str | tuple[str, int], *, prefix: bytes = b'', serializer: ~collections.abc.Callable = <built-in function dumps>, curve_config: ~bluesky.callbacks.zmq.ClientCurve | None = None)[source]#
A callback that publishes documents to a 0MQ proxy.
- Parameters:
- addressstring or tuple
Address of a running 0MQ proxy, given either as a string like
'127.0.0.1:5567'or as a tuple like('127.0.0.1', 5567)- prefixbytes, optional
User-defined bytestring used to distinguish between multiple Publishers. May not contain b’ ‘.
- serializer: function, optional
optional function to serialize data. Default is pickle.dumps
- curve_config: ClientCurve, optional
CURVE security configuration for client authentication.
Examples
Publish from a RunEngine to a Proxy running on localhost on port 5567.
>>> publisher = Publisher('localhost:5567') >>> RE = RunEngine({}) >>> RE.subscribe(publisher)
- class bluesky.callbacks.zmq.RemoteDispatcher(address: str | tuple[str, int], *, prefix: bytes = b'', loop: ~asyncio.events.AbstractEventLoop | None = None, deserializer: ~collections.abc.Callable = <built-in function loads>, strict: bool = False, curve_config: ~bluesky.callbacks.zmq.ServerCurve | ~bluesky.callbacks.zmq.ClientCurve | None = None)[source]#
Dispatch documents received over the network from a 0MQ proxy.
- Parameters:
- addresstuple
Address of a running 0MQ proxy, given either as a string like
'127.0.0.1:5567'or as a tuple like('127.0.0.1', 5567)- prefixbytes, optional
User-defined bytestring used to distinguish between multiple Publishers. If set, messages without this prefix will be ignored. If unset, no mesages will be ignored.
- loopzmq.asyncio.ZMQEventLoop, optional
optional event loop to use. Default is to create a new event loop.
- deserializer: function, optional
optional function to deserialize data. Default is pickle.loads
Examples
Print all documents generated by remote RunEngines.
>>> d = RemoteDispatcher(('localhost', 5568)) >>> d.subscribe(print) >>> d.start() # runs until interrupted
Secondary Event Stream#
For certain applications, it may desirable to interpret event documents as
they are created instead of waiting for them to reach offline storage. In order
to keep this information completely quarantined from the raw data, the
LiveDispatcher presents a completely unique stream that can be
subscribed to using the same syntax as the RunEngine.
In the majority of applications of LiveDispatcher, it is expected
that subclasses are created to implement online analysis. This secondary event
stream can be displayed and saved offline using the same callbacks that you
would use to display the raw data.
Below is an example using the streamz library to average a number of
events together. The callback can be configured by looking at the start
document metadata, or at initialization time. Events are then received and
stored by the streamz network and a new averaged event is emitted when the
correct number of events are in the cache. The important thing to note here is
that the analysis only handles creating new data keys, but the descriptors,
sequence numbering and event ids are all handled by the base LiveDispatcher
class.
class AverageStream(LiveDispatcher):
"""Stream that averages data points together"""
def __init__(self, n=None):
self.n = n
self.in_node = None
self.out_node = None
self.averager = None
super().__init__()
def start(self, doc):
"""
Create the stream after seeing the start document
The callback looks for the 'average' key in the start document to
configure itself.
"""
# Grab the average key
self.n = doc.get('average', self.n)
# Define our nodes
if not self.in_node:
self.in_node = streamz.Source(stream_name='Input')
self.averager = self.in_node.partition(self.n)
def average_events(cache):
average_evt = dict()
desc_id = cache[0]['descriptor']
# Check that all of our events came from the same configuration
if not all([desc_id == evt['descriptor'] for evt in cache]):
raise Exception('The events in this bundle are from '
'different configurations!')
# Use the last descriptor to avoid strings and objects
data_keys = self.raw_descriptors[desc_id]['data_keys']
for key, info in data_keys.items():
# Information from non-number fields is dropped
if info['dtype'] in ('number', 'array'):
# Average together
average_evt[key] = np.mean([evt['data'][key]
for evt in cache], axis=0)
return {'data': average_evt, 'descriptor': desc_id}
self.out_node = self.averager.map(average_events)
self.out_node.sink(self.process_event)
super().start(doc)
def event(self, doc):
"""Send an Event through the stream"""
self.in_node.emit(doc)
def stop(self, doc):
"""Delete the stream when run stops"""
self.in_node = None
self.out_node = None
self.averager = None
super().stop(doc)
LiveDispatcher API#
- class bluesky.callbacks.stream.LiveDispatcher[source]#
A secondary event stream of processed data
The LiveDispatcher base implementation does not change any of the data emitted, this task is left to sub-classes, but instead handles reimplementing a secondary event stream that fits the same schema demanded by the RunEngine itself. In order to reduce the work done by these processed data pipelines, the LiveDispatcher handles the nitty-gritty details of formatting the event documents. This includes creating new uids, numbering events and creating descriptors.
The LiveDispatcher can be subscribed to using the same syntax as the RunEngine, effectively creating a small chain of callbacks
# Create our dispatcher ld = LiveDispatcher() # Subscribe it to receive events from the RunEgine RE.subscribe(ld) # Subscribe any callbacks we desire to second stream ld.subscribe(LivePlot('det', x='motor'))
- event(doc, **kwargs)[source]#
Receive an event document from the raw stream.
This should be reimplemented by a subclass.
- Parameters:
- docevent
- kwargs:
All keyword arguments are passed to
process_event()
- process_event(doc, stream_name='primary', id_args=None, config=None)[source]#
Process a modified event document then emit it for the modified stream
This will pass an Event document to the dispatcher. If we have received a new event descriptor from the original stream, or we have received a new set of id_args or descriptor_id , a new descriptor document is first issued and passed through to the dispatcher. When issuing a new event, the new descriptor is given a new source field.
- Parameters:
- docevent
- stream_namestr, optional
String identifier for a particular stream
- id_argstuple, optional
Additional tuple of hashable objects to identify the stream
- config: dict, optional
Additional configuration information to be included in the event descriptor
Notes
Any callback subscribed to the Dispatcher will receive these event streams. If nothing is subscribed, these documents will not go anywhere.